I am always looking for interesting calculus problems to demonstrate various concepts and perhaps generate some interest in pure mathematics.
And yes, I like to “blow off some steam” by spending some time having some non-technical mathematical fun with elementary mathematics.
This post uses only:
1. Integration by parts and basic reduction formulas.
2. Trig substitution.
3. Calculation of volumes (and hyper volumes) by the method of cross sections.
4. Induction
5. Elementary arithmetic involving factorials.
The quest: find a formula that finds the (hyper)volume of the region 
We will assume that the usual tools of calculus work as advertised.
Start. If we done the (hyper)volume of the k-ball by  we will start with the assumption that
we will start with the assumption that  ; that is, the distance between the endpoints of
; that is, the distance between the endpoints of ![[-R,R]](https://s0.wp.com/latex.php?latex=%5B-R%2CR%5D+&bg=ffffff&fg=000000&s=0&c=20201002) is
is  .
.
Step 1: we show, via induction, that  where
where  is a constant and
is a constant and  is the radius.
is the radius.
Our proof will be inefficient for instructional purposes.
We know that  hence the induction hypothesis holds for the first case and
hence the induction hypothesis holds for the first case and  . We now go to show the second case because, for the beginner, the technique will be easier to follow further along if we do the
. We now go to show the second case because, for the beginner, the technique will be easier to follow further along if we do the  case.
case.
Yes, I know that you know that  and you’ve seen many demonstrations of this fact. Here is another: let’s calculate this using the method of “area by cross sections”. Here is
and you’ve seen many demonstrations of this fact. Here is another: let’s calculate this using the method of “area by cross sections”. Here is  with some
with some  cross sections drawn in.
cross sections drawn in.
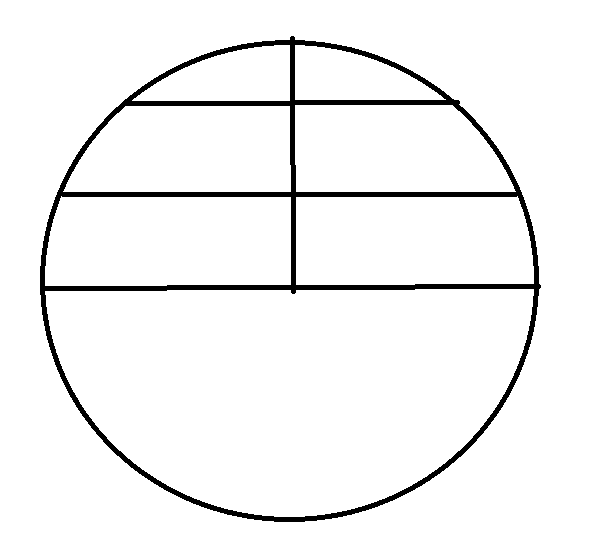
Now do the calculation by integrals: we will use symmetry and only do the upper half and multiply our result by 2. At each  level, call the radius from the center line to the circle
level, call the radius from the center line to the circle  so the total length of the “y is constant” level is
so the total length of the “y is constant” level is  and we “multiply by thickness “dy” to obtain
and we “multiply by thickness “dy” to obtain  .
.
But remember that the curve in question is and so if we set  we have
we have  and so our integral is
and so our integral is 
Now this integral is no big deal. But HOW we solve it will help us down the road. So here, we use the change of variable (aka “trigonometric substitution”):  to change the integral to:
to change the integral to:
 therefore
therefore
 where:
where:

Yes, I know that this is an easy integral to solve, but I first presented the result this way in order to make a point.
Of course, 
Therefore,  as expected.
as expected.
Exercise for those seeing this for the first time: compute  and
and  by using the above methods.
by using the above methods.
Inductive step: Assume  Now calculate using the method of cross sections above (and here we move away from x-y coordinates to more general labeling):
Now calculate using the method of cross sections above (and here we move away from x-y coordinates to more general labeling):

Now we do the substitutions: first of all, we note that  and so
and so
 . Now for the key observation:
. Now for the key observation:  and so
and so 
Now use the induction hypothesis to note:

Now do the substitution  and the integral is now:
and the integral is now:
 which is what we needed to show.
which is what we needed to show.
In fact, we have shown a bit more. We’ve shown that  and, in general,
and, in general,

Finishing the formula
We now need to calculate these easy calculus integrals: in this case the reduction formula:
 is useful (it is merely integration by parts). Now use the limits and elementary calculation to obtain:
is useful (it is merely integration by parts). Now use the limits and elementary calculation to obtain:
 to obtain:
to obtain:
 if
if  is even and:
is even and:
 if is odd.
if is odd.
Now to come up with something resembling a closed formula let’s experiment and do some calculation:
Note that  .
.
So we can make the inductive conjecture that  and see how it holds up:
and see how it holds up: 

Now notice the telescoping effect of the fractions from the  factor. All factors cancel except for the
factor. All factors cancel except for the  in the first denominator and the 2 in the first numerator, as well as the
in the first denominator and the 2 in the first numerator, as well as the  factor. This leads to:
factor. This leads to:
 as required.
as required.
Now we need to calculate 

To simplify this further: split up the factors of the  in the denominator and put one between each denominator factor:
in the denominator and put one between each denominator factor:
 Now multiply the denominator by
Now multiply the denominator by  and put one factor with each
and put one factor with each  factor in the denominator; also multiply by in the numerator to obtain:
factor in the denominator; also multiply by in the numerator to obtain:
 Now gather each factor of 2 in the numerator product of the 2k, 2k-2…
Now gather each factor of 2 in the numerator product of the 2k, 2k-2…
 which is the required formula.
which is the required formula.
So to summarize:


Note the following:  . If this seems strange at first, think of it this way: imagine the n-ball being “inscribed” in an n-cube which has hyper volume
. If this seems strange at first, think of it this way: imagine the n-ball being “inscribed” in an n-cube which has hyper volume  . Then consider the ratio
. Then consider the ratio  ; that is, the n-ball holds a smaller and smaller percentage of the hyper volume of the n-cube that it is inscribed in; note the
; that is, the n-ball holds a smaller and smaller percentage of the hyper volume of the n-cube that it is inscribed in; note the  corresponds to the number of corners in the n-cube. One might see that the rounding gets more severe as the number of dimensions increases.
corresponds to the number of corners in the n-cube. One might see that the rounding gets more severe as the number of dimensions increases.
One also notes that for fixed radius R,  as well.
as well.
There are other interesting aspects to this limit: for what dimension does the maximum hypervolume occur? As you might expect: this depends on the radius involved; a quick glance at the hyper volume formulas will show why. For more on this topic, including an interesting discussion on this limit itself, see Dave Richardson’s blog Division by Zero. Note: his approach to finding the hyper volume formula is also elementary but uses polar coordinate integration as opposed to the method of cross sections.

























 though, of course, there is some choice in what
though, of course, there is some choice in what  is; any anti-derivative will do. Well, sort of.
is; any anti-derivative will do. Well, sort of. where
where  is the random variable that denotes the number of years longer a person aged
is the random variable that denotes the number of years longer a person aged  will live. Of course,
will live. Of course,  is a probability distribution function with density function
is a probability distribution function with density function  and if we assume that
and if we assume that  is smooth and
is smooth and  and, in principle this integral can be done by parts….but…if we use
and, in principle this integral can be done by parts….but…if we use  we have:
we have: which is a big problem on many levels. For one,
which is a big problem on many levels. For one,  and so the new integral does not converge..and the first term doesn’t either.
and so the new integral does not converge..and the first term doesn’t either.  we note that
we note that  is the survival function whose limit does go to zero, and there is usually the assumption that
is the survival function whose limit does go to zero, and there is usually the assumption that  as
as 
 which is one of the more important formulas.
which is one of the more important formulas. 
 but that is the subject of another post)
but that is the subject of another post) . Typically, we insist that the functions be, say,
. Typically, we insist that the functions be, say,  and note that it is a bit of a chore to show that the convolution of two
and note that it is a bit of a chore to show that the convolution of two  for
for ![x \in (0,1]](https://s0.wp.com/latex.php?latex=x+%5Cin+%280%2C1%5D+&bg=ffffff&fg=000000&s=0&c=20201002) and zero elsewhere)
and zero elsewhere)  be the function that is
be the function that is  for
for ![x \in [\frac{-1}{2}, \frac{1}{2}]](https://s0.wp.com/latex.php?latex=x+%5Cin+%5B%5Cfrac%7B-1%7D%7B2%7D%2C+%5Cfrac%7B1%7D%7B2%7D%5D+&bg=ffffff&fg=000000&s=0&c=20201002) and zero elsewhere. So, what is
and zero elsewhere. So, what is  ???
??? only assumes the value of
only assumes the value of  plane and is zero elsewhere; this is just like doing an iterated integral of a two variable function; at least the first step. This is why it fits well into calculus III.
plane and is zero elsewhere; this is just like doing an iterated integral of a two variable function; at least the first step. This is why it fits well into calculus III. for the following region:
for the following region: 
 .
. 
 has the following description:
has the following description:![f(x-t)f(t)=\left\{\begin{array}{c} 1,x \in [-1,0], -\frac{1}{2} t \le \frac{1}{2}+x \\ 1 ,x\in [0,1], -\frac{1}{2}+x \le t \le \frac{1}{2} \\ 0 \text{ elsewhere} \end{array}\right.](https://s0.wp.com/latex.php?latex=f%28x-t%29f%28t%29%3D%5Cleft%5C%7B%5Cbegin%7Barray%7D%7Bc%7D+1%2Cx+%5Cin+%5B-1%2C0%5D%2C+-%5Cfrac%7B1%7D%7B2%7D+t+%5Cle+%5Cfrac%7B1%7D%7B2%7D%2Bx+%5C%5C+1+%2Cx%5Cin+%5B0%2C1%5D%2C+-%5Cfrac%7B1%7D%7B2%7D%2Bx+%5Cle+t+%5Cle+%5Cfrac%7B1%7D%7B2%7D+%5C%5C+0+%5Ctext%7B+elsewhere%7D+%5Cend%7Barray%7D%5Cright.++&bg=ffffff&fg=000000&s=0&c=20201002)
 for
for  and
and  for
for ![x \in [0,1]](https://s0.wp.com/latex.php?latex=x+%5Cin+%5B0%2C1%5D+&bg=ffffff&fg=000000&s=0&c=20201002) .
.
 represent the tent map: the support of
represent the tent map: the support of  is
is ![[-1,1]](https://s0.wp.com/latex.php?latex=%5B-1%2C1%5D+&bg=ffffff&fg=000000&s=0&c=20201002) and it has the following graph:
and it has the following graph:![f(x)=\left\{\begin{array}{c} x+1,x \in [-1,0) \\ 1-x ,x\in [0,1] \\ 0 \text{ elsewhere} \end{array}\right.](https://s0.wp.com/latex.php?latex=f%28x%29%3D%5Cleft%5C%7B%5Cbegin%7Barray%7D%7Bc%7D+x%2B1%2Cx+%5Cin+%5B-1%2C0%29+%5C%5C+1-x+%2Cx%5Cin+%5B0%2C1%5D+%5C%5C+0+%5Ctext%7B+elsewhere%7D+%5Cend%7Barray%7D%5Cright.++&bg=ffffff&fg=000000&s=0&c=20201002)

 and do the integrals:
and do the integrals: and substitute and simplify later:
and substitute and simplify later:
 and the next two have the same anti-derivative which can be obtained by a “integration by parts” calculation:
and the next two have the same anti-derivative which can be obtained by a “integration by parts” calculation:  ; evaluating the limits yields:
; evaluating the limits yields:
 . NOW use
. NOW use  and we have the integral is
and we have the integral is  by Euler’s formula.
by Euler’s formula. so
so  so our answer is
so our answer is  which is often denoted as
which is often denoted as  as
as  function
function (as we want the function to have zeros at integers and to “equal” one at
(as we want the function to have zeros at integers and to “equal” one at  (remember that famous limit!)
(remember that famous limit!) made the algebra a whole lot easier.
made the algebra a whole lot easier.
 axis (the line
axis (the line  ).
). . (constant density lamina).
. (constant density lamina). .
. .
. in their answers to 4, 5, and…yes, even 1.
in their answers to 4, 5, and…yes, even 1.
 ; of course,
; of course,  is the cross sectional volume of water.
is the cross sectional volume of water. ; of coure,
; of coure,  is the pressure at that depth) and
is the pressure at that depth) and  is the area at depth
is the area at depth  . On the other hand, if you just declared EVERYONE to be “cancer free”, you’d be wrong only 1.4 percent of the time! So clearly that does not work; the “false negative” rate is 100 percent, though the “false positive” rate is 0.
. On the other hand, if you just declared EVERYONE to be “cancer free”, you’d be wrong only 1.4 percent of the time! So clearly that does not work; the “false negative” rate is 100 percent, though the “false positive” rate is 0. ; this gives us something to optimize. The partial derivatives are:
; this gives us something to optimize. The partial derivatives are: . Note that
. Note that  is positive since
is positive since  is less than 1 (in fact, it is small). We also know that the critical point
is less than 1 (in fact, it is small). We also know that the critical point  is a bit of a “duh”: find a single test that gives no false positives and no false negatives. This also shows us that our predictions will be better if
is a bit of a “duh”: find a single test that gives no false positives and no false negatives. This also shows us that our predictions will be better if  for us, and
for us, and  . Note that
. Note that  and
and  . Hence an increase in the accuracy of the
. Hence an increase in the accuracy of the  leads to an improvement of about .00136 (substitute
leads to an improvement of about .00136 (substitute  into the expression for
into the expression for  and multiply by
and multiply by  . Similarly an improvement (decrease) of
. Similarly an improvement (decrease) of  leads to an improvement of .013609.
leads to an improvement of .013609. ) we get
) we get  . Now let’s change:
. Now let’s change:  leads to
leads to 
 we get
we get 

 represent the mass of the object;
represent the mass of the object;  implies that
implies that  which isn’t that important; we’ll just use
which isn’t that important; we’ll just use  . By elementary integration, obtain
. By elementary integration, obtain  and integrate again to obtain
and integrate again to obtain  which has parametric equations
which has parametric equations  which has a “sideways parabola” as a graph.
which has a “sideways parabola” as a graph. 
 . The first term is thrust and is against the direction of acceleration. So we have:
. The first term is thrust and is against the direction of acceleration. So we have: which, upon integration, implies that
which, upon integration, implies that  and so we see that the rocket continues to speed up at a constant acceleration.
and so we see that the rocket continues to speed up at a constant acceleration. 