If you are interested, I’ll be posting on topics that deal with my current area of research here.
I am reproducing this post below but will NOT publish further installments on this blog:
A knot is an embedding of the circle 


Note: sometimes we focus on the image of the embedding itself (i. e., the geometric object) and sometimes we focus on the map, which includes information about orientation.
Example: If one has 


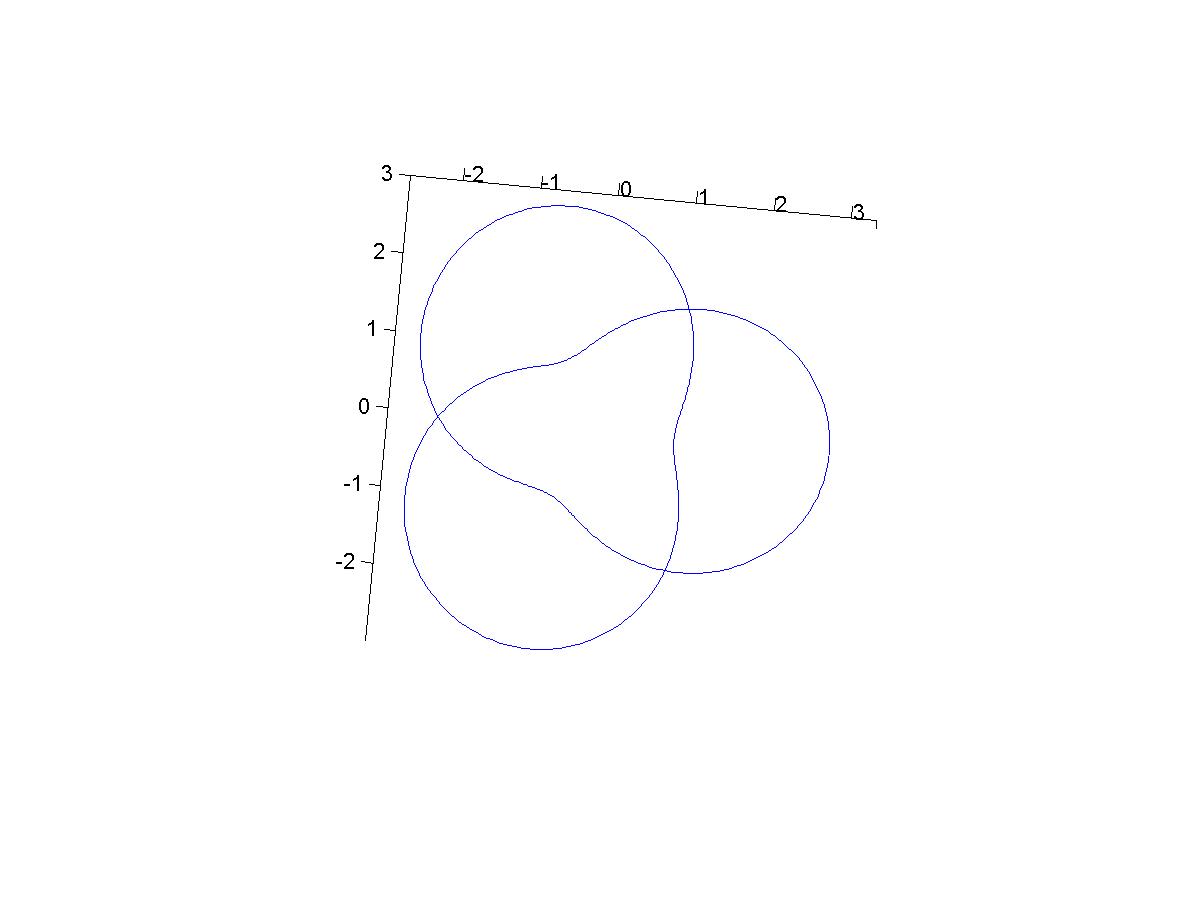
The second is a projection of the image of the trefoil onto the 

Here, the broken line indicates that the strand passes under another strand.
It is custom to insist on “regular” projections, which means that:
1. All “singularities” (points on the diagram which correspond to more than one point of the knot) are double points (there are no points where 3 or more strands of the knot’s projection meet)
2. All crossings are “honest” crossings; that is there are no “tangents” (places where the projection “kisses” another strand).
Note: one can think of a diagram as a “shadow” of the knot on a plane, provided one adds crossing information at all double points.
Now not all knots possess a diagram, but it is a known fact that all smooth knots (knots that arise from differentiable embeddings) and all picewise linear knots (knots whose image consists of a finite number of straight line segments glued end to end) have a projection.
Most of knot theory research deals with smooth or piecewise linear embeddings of the circle into 


Also, link theory deals with multiple knots together.

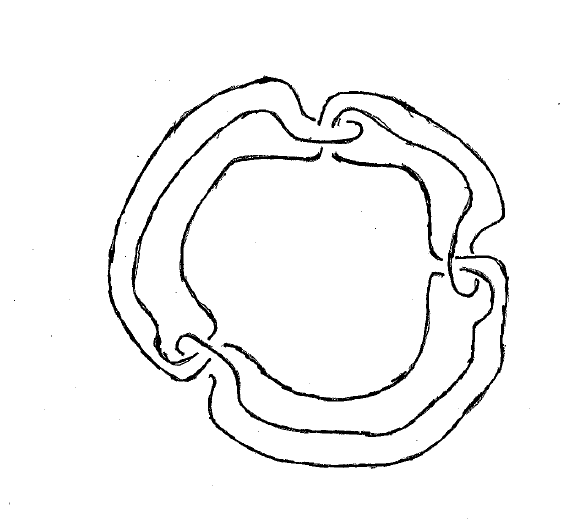
The above shows the Borromean Rings, which are three linked knots, no two of which are linked to each other. This is a famous 3-component link.
This blog will mostly focus on the following:
1. non-smooth (and non-piecewise linear) embeddings of the circle into

These two diagrams are of non-smooth (and non-p. l.) knots; we call these wild knots. Notice how the stitches and arcs get smaller and converge to a point? That point is called a wild point. I will give a precise definition later; for right now we’ll tell you that it is impossible to assign a tangent vector to those points in some well defined way.
2. An arc is the image of ![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D+&bg=ffffff&fg=000000&s=0&c=20201002)
On the other hand, the mathematics of wild arcs (think: non-smooth/p. l. ) is every interesting.

The above arc has two wild points (the end points) and can NOT be straightened out in space into a straight arc. We’ll make this concept clear a bit later in another post).
3. Straight lines (a copy of the real line) into open 3-manifolds; we will insist that the “two infinities” of the line go to the “infinities” in the manifold.

In the above, the reader is invited to think of the “line” being embedded in the space 

I will call this Proper Knot Theory; the term “proper” is a technical term, which I will explain here: a continuous map 



![[0, \frac{\pi}{2}]](https://s0.wp.com/latex.php?latex=%5B0%2C+%5Cfrac%7B%5Cpi%7D%7B2%7D%5D+&bg=ffffff&fg=000000&s=0&c=20201002)
Equivalence Classes for Knots
In most of knot theory, what is studied is NOT the knots themselves but their “equivalence classes”. For example: the first example of the knot we have had a very specific function to define it. However, if we were to say, take a strand of the knot and move it a little, we’d get a different embedding, but mathematically we’d want to think of it as being “the same as” the original embedding. This makes the subject much more doable. Besides, knot theory is studied mostly because it impacts the study of the topology of 3-manifolds: such spaces are modified by doing operations (called “surgery”) which are often defined as being done along some embedded circle: a knot. In many cases, the objected obtained doesn’t differ “topologically” if the surgery knot is changed by some “motion of space”.
The same principle often applies if a scientist is, say, studying a knotted molecule or DNA strand.

So we need to state the equivalence classes.
Classical Knot Theory (the kind most often done)
Note: sometimes oriented knots are studied (the diagrams have arrows) and sometimes the unoriented knots are studied (no arrows). Sometimes this makes a difference as we shall see later.

The above is an example of an oriented knot diagram.
The most common equivalence class used:
Given two knots (or links) in three space, say, 

![F: S^3 \times [0,1] \rightarrow S^3](https://s0.wp.com/latex.php?latex=F%3A+S%5E3+%5Ctimes+%5B0%2C1%5D+%5Crightarrow+S%5E3+&bg=ffffff&fg=000000&s=0&c=20201002)
1. 
![t \in [0,1]](https://s0.wp.com/latex.php?latex=t+%5Cin+%5B0%2C1%5D+&bg=ffffff&fg=000000&s=0&c=20201002)
2. 



The above is just a fancy way of saying that we can “deform space” to turn 

It turns out that this definition is equivalent to the following simpler definition: 

There is also another type of equivalence that is used: two knots
If 

So, classical knot theory (the kind most often studied) boils down to four different kinds:
1. oriented knots; mirror images considered equivalent.
2. oriented knots; mirror images NOT automatically considered equivalent.
3. non-oriented knots, mirror images considered equivalent.
4. non-oriented knots, mirror images not automatically considered equivalent.
A knot that is different from a knot with the same image but with a different orientation (arrow direction) is said to be non-invertible.
A knot that is different from its mirror image is said to be chiral.
The trefoil knot: is chiral but invertible (you can reverse the arrows by an orientation preserving homeomorphism)
The figure 8 knot: is NOT chiral and is invertible.

Non-invertible knots exist; here is an example: (

The astute reader might wonder: “hey, you didn’t say anything about your isotopy or homeomorphism being smooth, piecewise linear or merely topological”. It turns out that in classical knot theory, this is a settled foundational question and therefore unimportant (here and here).
However this issue does appear in other kinds of knot theory, including those we will be discussing.
Wild knots
A knot (link or arc) is said to be tame if it is equivalent to a smooth (or p. l.) knot (equivalence class of choice). If it isn’t, it is called wild.
Note: it isn’t always immediately obvious if an arc is wild or tame; for example, the arc in the upper left hand corner is wild (wild point is the left end point) whereas the the lower right arc (which has separate trefoil knots converging to an endpoint) is actually tame!

We will discuss this later; note that the “infinite trefoil” arc is just on the edge of being wild; were we to add on, say, a straight segment at the left hand endpoint and extend it any finite distance at all, the arc would become wild. That appears to make no sense at all (at first glance) but in a later post I will provide a proof.
We will study wild knots of various kinds; note: it is possible for a knot to be wild at ALL of its points. We’ll get to this in a later post; if you can’t wait, here is an example: consider the following picture, which is supposed to represent a nested series of solid tori, (think: a bagel or doughnut) which are nested inside one another. If we intersect all of these knotted up tori, we end up with a very ill behaved wild knot in 3-space; this knot is wild at all of its points:

I am running out of steam; so in our next installment I’ll talk about different types of equivalence classes for knots in 3 space and for lines (proper knots) in open 3-manifolds. (note: I’ll post this on my research blog, not here).
 .
.
 at
at  .
. is a winner. This gives an example of a
is a winner. This gives an example of a  function that is not analytic (on any open interval containing 0 ).
function that is not analytic (on any open interval containing 0 ). ,
,  fixed,
fixed,  .
. I’ll let it be understood that I mean the conditional function that I wrote above.
I’ll let it be understood that I mean the conditional function that I wrote above.  ; this is one time we can calculate a limit without using a function which one can merely “plug in”. It is easy to see that
; this is one time we can calculate a limit without using a function which one can merely “plug in”. It is easy to see that  .
. ; this is one case where we can’t merely “calculate”.
; this is one case where we can’t merely “calculate”. provides an example of a function that is differentiable at the origin but is not continuously differentiable there. It isn’t hard to see why; away from 0 the derivative is
provides an example of a function that is differentiable at the origin but is not continuously differentiable there. It isn’t hard to see why; away from 0 the derivative is  and the limit as
and the limit as  approaches zero exists for the first term but not the second. Of course, by upping the power of
approaches zero exists for the first term but not the second. Of course, by upping the power of  one can find a function that is
one can find a function that is  times differentiable at the origin but not
times differentiable at the origin but not  continuously differentiable.
continuously differentiable.  and
and  is differentiable at
is differentiable at  . Then we know that
. Then we know that  is differentiable at
is differentiable at  and the derivative is
and the derivative is  . The “natural” proof (say, for
. The “natural” proof (say, for  non-constant near
non-constant near  looks at the difference quotient:
looks at the difference quotient:  which works fine, so long as
which works fine, so long as  . So what could possibly go wrong; surely the set of values of
. So what could possibly go wrong; surely the set of values of  for a differentiable function is finite right? 🙂 That is where
for a differentiable function is finite right? 🙂 That is where  comes into play; this equals zero at an infinite number of points in any neighborhood of the origin.
comes into play; this equals zero at an infinite number of points in any neighborhood of the origin.  . Then it is easy to see that
. Then it is easy to see that  since the second factor of the last term is zero when
since the second factor of the last term is zero when  and the limit of
and the limit of  exists at
exists at  over some closed interval
over some closed interval ![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D+&bg=ffffff&fg=000000&s=0&c=20201002) and partitions
and partitions  look at upper and lower sums of
look at upper and lower sums of  and if the upper and lower sums converge as the width of the partions go to zero, you have the integral
and if the upper and lower sums converge as the width of the partions go to zero, you have the integral  . But this works only if
. But this works only if  such that
such that  for ALL partitions
for ALL partitions  is differentiable with a bounded derivative on
is differentiable with a bounded derivative on ![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=000000&s=0&c=20201002) then it isn’t hard to see that
then it isn’t hard to see that  be a bound for
be a bound for  and then use the Mean Value Theorem to replace each
and then use the Mean Value Theorem to replace each  by
by  and the result follows easily.
and the result follows easily.  . 🙂 Now consider a partition of the following variety:
. 🙂 Now consider a partition of the following variety:  . Example: say
. Example: say  . Compute the variation:
. Compute the variation:  . This leads to trouble as this sum has no limit as we progress with more points in the sequence of partitions; we end up with a divergent series (the Harmonic Series) as one term as points are added to the partition.
. This leads to trouble as this sum has no limit as we progress with more points in the sequence of partitions; we end up with a divergent series (the Harmonic Series) as one term as points are added to the partition.  to be continuous on an interval. You know what it means for
to be continuous on an interval. You know what it means for  works for a given
works for a given  no matter where you are, and if the interval is a closed one, an easy “compactness” argument shows that continuity and uniform continuity are equivalent. Absolute continuity is like uniform continuity on steroids. I’ll state it for a closed interval:
no matter where you are, and if the interval is a closed one, an easy “compactness” argument shows that continuity and uniform continuity are equivalent. Absolute continuity is like uniform continuity on steroids. I’ll state it for a closed interval:  there is a
there is a  such that for
such that for  where
where  are pairwise disjoint intervals. An example of a function that is continuous on a closed interval but not absolutely continuous? Yes;
are pairwise disjoint intervals. An example of a function that is continuous on a closed interval but not absolutely continuous? Yes;  on any interval containing
on any interval containing  is an example; the work that we did in paragraph 5 works nicely; just make the intervals pairwise disjoint.
is an example; the work that we did in paragraph 5 works nicely; just make the intervals pairwise disjoint.